 767
767
 0
0
 2023-01-15
2023-01-15
 2023-01-16
2023-01-16
本新闻研究来源于2022年12月发表在《iscience 》的论文《learning to control a bmi-driven wheelchair for people with severe tetraplegia 》。作者是来自意大利帕多瓦大学 的luca tonin等人。
意识控制轮椅是一个有趣的辅助行动k8凯发旗舰的解决方案,同时也是康复领域极具应用前景的研究方向,它适用于完全瘫痪的患者。脑控机器人和神经假肢的日常使用是脑机接口(bmi)对患有严重运动障碍的人的最大承诺。尽管在最近几年bmi技术取得了进展,并且部分研究已显示bmi控制机器人装置的潜力(如机械臂、外骨骼、轮椅)。但基于bmi的机器人与终端用户群体的纵向实验很少,这阻碍了其从实验室原型到现实世界的有效过渡。因此,脑控机器人临床的转化进程仍较难实现。近日,一项康复领域的研究说明了重度四肢瘫痪患者经过思维控制训练可以控制所坐轮椅的行进。
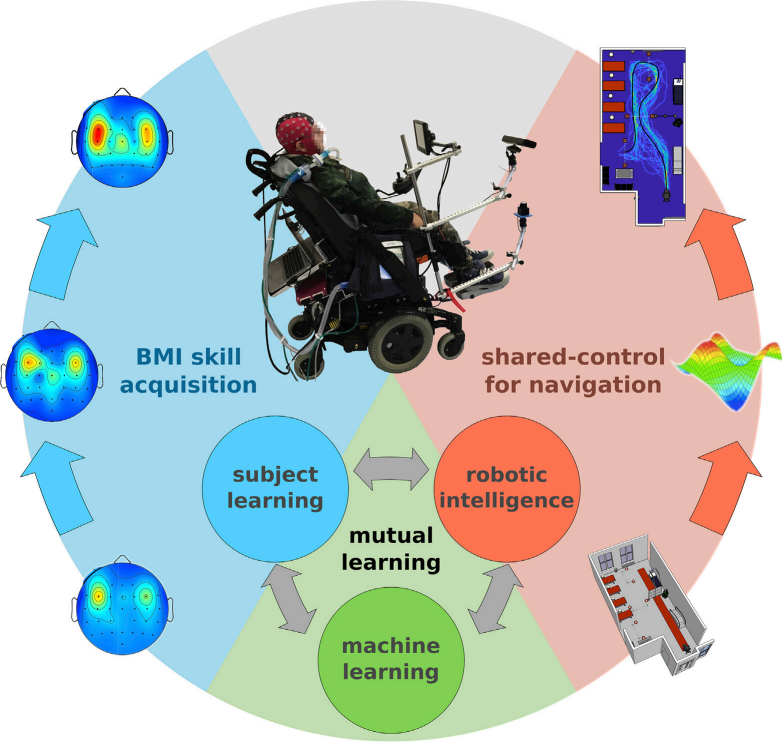
该研究主要目的是探究假说:最终用户掌握bmi技能是在现实世界中控制无创脑控智能轮椅的基础。并通过3个四肢瘫痪的脊髓损伤患者操作一个无创的、自定步速的意识控制轮椅,执行复杂的导航任务的实验,证明了重度四肢瘫痪患者经过训练可以控制轮椅的行进。此外,该研究表明,通过低自由度、离散和不确定的控制通道(如运动想象bmi),利用共享控制方法融合人与人工智能,可以实现对机器人的灵巧、连续控制。该研究还认为,主体学习和共享控制是为转化非侵入式bmi铺平道路的关键组成部分。该研究发表在《iscience》上。
三名参与者均为男性,且为脊髓损伤(sci)后四肢瘫痪者和轮椅使用者(p1-p3,见表1)。p1 26岁,其颈部以下无活动能力,依赖辅助通气。p2 59岁,其剩余运动功能仅限于举起手臂和手指的轻微运动。p3 56岁,他可以轻微移动手臂和手指。
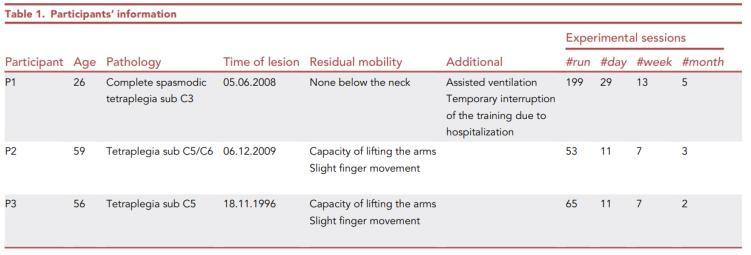
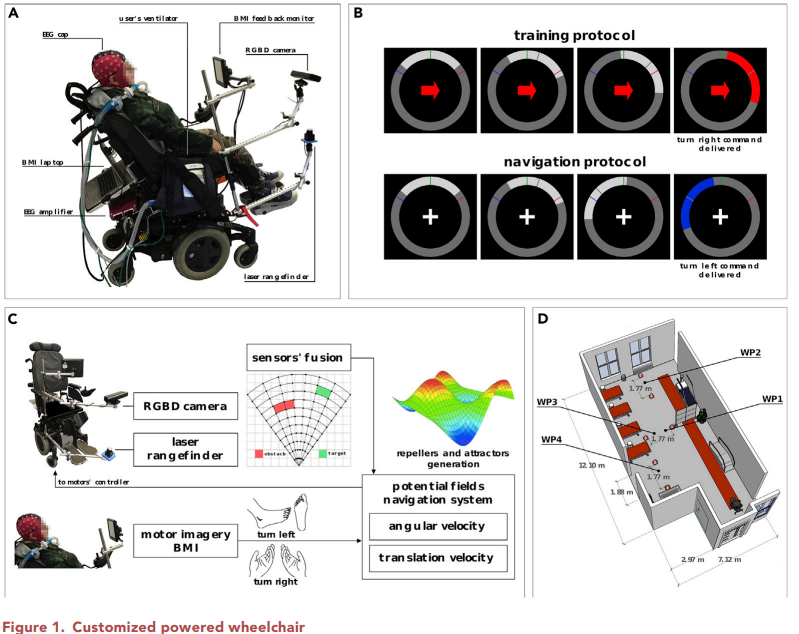
三名参与者(p1-p3,见表1)参加了一项纵向训练方案,目的是学习调节由两项心理任务引起的自调速感觉运动节律(smr),即双手和双脚的想象运动。 在bmi训练期间(分别为5个月、3个月和2个月,强度为每周3 sessions),参与者头戴脑电帽,坐在定制的电动轮椅上(图1a),并要求他们根据bmi解码器解码的心理任务控制模拟方向盘向左或向右旋转的视觉反馈(图1b)。通过脑电图(eeg)检测他们的大脑活动,并通过脑机接口设备将eeg信号转换为对轮椅的机械指令(轮椅的原地旋转遵循用户正确传递的命令)。具体而言,受试者患者在思考移动双手时向左转,移动双脚时轮椅向右转。在完成训练几天后,参与者被要求在机器人智能的支持下在真实世界的场景中驾驶轮椅(图1c、1d)。
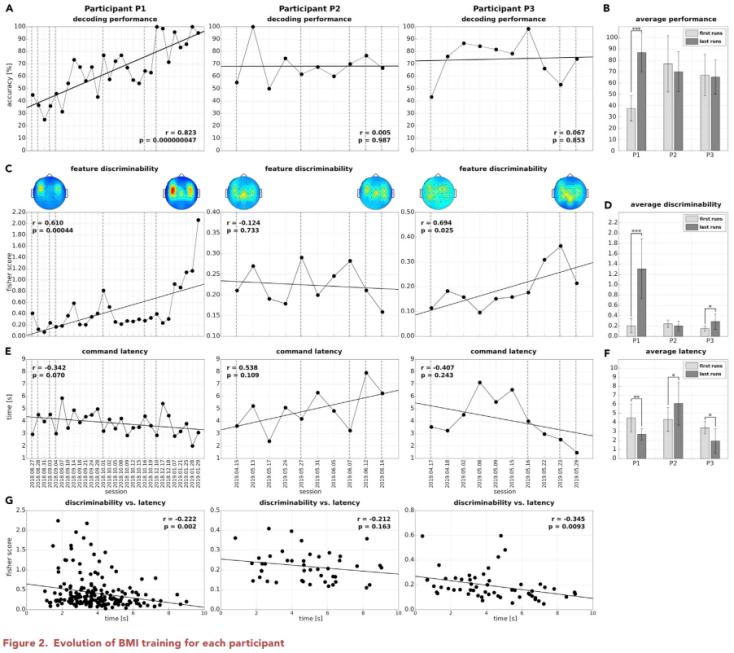
在第一次训练中,当设备的反应与用户的想法一致时,三名受试者的准确率在43%至55%区间内。在训练过程中,该团队发现受试者1的准确性有了显著提高,在训练结束时达到了95%以上的准确性。该团队还观察到,在用新算法更新设备之前,受试者在训练中途的准确率提高了3%至98%不等。
在受试者1和受试者3中观察到,控制轮椅的准确率改善与特征辨别能力的改善相关,特征辨别能力是算法区分编码为“向左”思维和编码为“向右”思维的大脑活动模式的能力。研究团队发现,更好的特征辨别能力不仅是设备机器学习的结果,也是受试者大脑学习的结果。受试者1和3的脑电图显示,随着他们在精神控制设备方面的准确性提高,脑电波模式出现了明显的变化。与受试者1和3相比,受试者2在整个训练过程中大脑活动模式无显著变化。在最初的几次训练中,他的准确率只略有提高,在接下来的训练中保持稳定。该研究认为这表明仅靠机器学习不足以成功操纵这种由大脑控制的轮椅。在模拟真实环境设置的驾驶轮椅的实验中,受试者1和3都完成了任务,而受试者2没有完成。
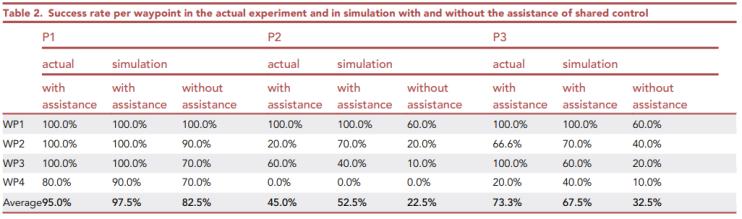
为了确定共享控制对导航性能的关键贡献,该研究用一个概率输入接口来模拟导航结果,该接口专门针对每个参与者的控制特性--即bmi精度和命令延迟。表2描述了在有或没有共享控制辅助的情况下,每个参与者在模拟中到达航路点的百分比。在共享控制下的仿真结果与各参与者的实际结果一致。对于bmi准确度高和命令延迟低(p1、p3)的受试者,共享控制仍然支持导航,但仅支持46.7±13.6%和42.3±18.4%的时间百分比。 对于较差的p2,共享控制在83.3±4.8%的运行时间内,在没有用户命令的情况下帮助驾驶轮椅。
在这项工作中,该研究证明了三个sci后严重四肢瘫痪的患者在真实世界的场景中以不同程度的熟练程度学习操作基于smr的bmi来驾驶智能机器人轮椅。 此外,该研究还证明了轮椅控制的熟练程度很大程度上依赖于在纵向训练过程中获得的健壮的bmi技能,以及利用机器人智能的共享控制算法的支持。 因此,该研究认为,相互学习和共享控制可能是开发稳健有效的脑驱动神经假体的两个基石,也是迄今为止实现bmi转化最有希望的途径。
尽管该研究证实了最终用户培训对转化bmi应用程序的作用,但该研究仍存在一定的局限性。首先,何时以及如何重新校准bmi解码器以结合新出现的特征或跟踪参与者学习的eeg调制仍然是一个开放的问题。该研究没有考虑到训练应该促进的基本神经生理变化。未来的研究应该研究如何将机器学习和主体学习结合起来。其次,该研究需要更多更大规模的研究来确定bmi辅助机器人技术的确切转化潜力。最后,未来的研究还应侧重于尚未解决的问题,如收集正式的最终用户体验和满意度反馈,以及利用互补成像(例如功能性磁共振成像)研究可塑性,这可以进一步提高严重运动病残疾人使用脑驱动轮椅的可用性。
撰稿人:易子怡
指导老师:潘家辉
参考资料:
1. https://www.sciencedirect.com/science/article/pii/s258900422201690x
2. https://mp.weixin.qq.com/s/ro0j_apnkkvamhu1fqopsg






